00:00 Начало 01:42 Тихоходки и анабиоз людей будущего 04:54 Пробуждение лунного японского самурая 06:15 Что ищут учёные на обратной стороне Луны 08:08 Недорогие строительные технологии 11:17 Надежные машины для ответственных задач 11:53 Что делают с гнилыми зубами в Гондурасе 15:50 К чему привели поиски целебных бактерий
Всякому вертолёту нужен двигатель - для приведения во вращение несущего винта, а также и хвостового винта. Или двух несущих винтов, в зависимости от схемы машины (соосной, продольной и поперечной).
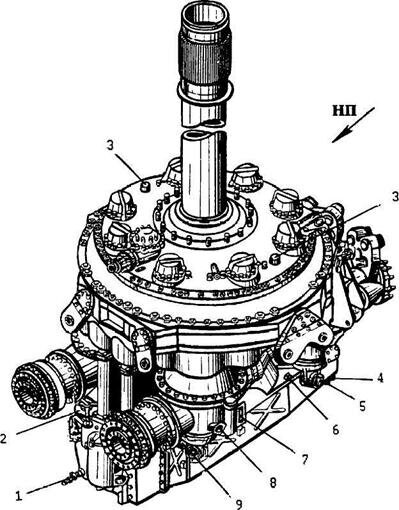
Двигатель этот может быть поршневым или газотурбинным. В обоих случаях привод от двигателя на винт осуществляется через редуктор. Связано это с тем, что обороты двигателя значительно выше нужных оборотов несущего винта. Понижающий редуктор необходим. Но этот агрегат очень дорогой и тяжёлый.
Схематический рисунок главного редуктора вертолёта
Кроме того, одним редуктором обойтись тоже не удаётся - ведь хвостовой винт имеет свой диапазон оборотов. Приходится ставить ещё один, а то и два редуктора. Трансмиссия вертолёта - сложная конструкция, состоящая из силовых установок, редукторов, валов, а также и системы управления несущим и хвостовым винтами... Это целый комплекс деталей и агрегатов требующих трепетного обслуживания....
Идея радикально упростить конструкцию витала в воздухе. Действительно, уже издавна известны такие инженерные изобретения как турбина Герона, или фейерверочное колесо. Поэтому- не поставить ли небольшой реактивный двигатель прямо на лопасть?
вертолёт с реактивным приводом несущего винта Hiller YH-32.
Каковы преимущества такого решения:
- Во- первых, при таком приводе не возникает реактивного момента, и соответственно, сразу отпадает нужда в хвостовом (рулевом) винте и его трансмиссии;
- Понижающий редуктор также не нужен;
- Вертолёт становится очень лёгким и простым, из-за радикального упрощения конструкции.
вертолёт Hiller HJ-1
Идея приобрела популярность еще с 1950-х годов. Вертолеты с реактивным приводом несущего винта строились и испытывались десятками. Как сверхлёгкие одноместные, так и тяжёлые.
Двигатели были разного типа: классические турбореактивные, пульсирующие, прямоточные, даже ракетные на перекиси водорода. Основными проблемами, которые обнаружились сразу, были прочностные: - центробежная сила, стремящаяся оторвать двигатель на рабочих оборотах, подача топлива через лопасть, тепловые нагрузки и высокий расход горючего. Да и ночью они выглядели впечатляюще:
Поэтому опробовали и другую схему, в которой газовая турбина стояла, традиционно, в корпусе вертолёта, а горячий газ от неё разводился по лопастям, так называемый "привод горячего цикла".
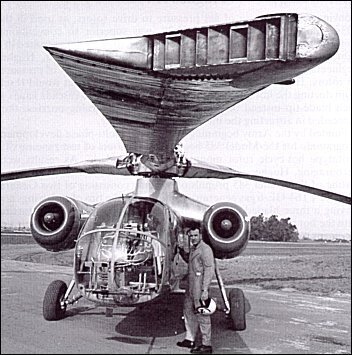
Ещё более удачной оказалась схема, где газотурбинный двигатель приводил воздушный компрессор с последующим разведением сжатого воздуха по лопастям к выходным патрубкам. По этой схеме строился единственный серийный реактивный вертолёт- французский "Джинн" - лёгкая машина общего назначения, первый полёт в 1953, построено 180 вертолетов.
французский "Джинн"
Почему же вертолёты с реактивным приводом не стали распространенными?
В первую очередь, из-за высокого расхода топлива в сравнении с обычной схемой, и соответственно, малой дальности полёта. Впрочем, схема не изжила себя, а за прошедшие полвека стали доступны новые технологические решения и материалы. Энтузиасты продолжают строить!
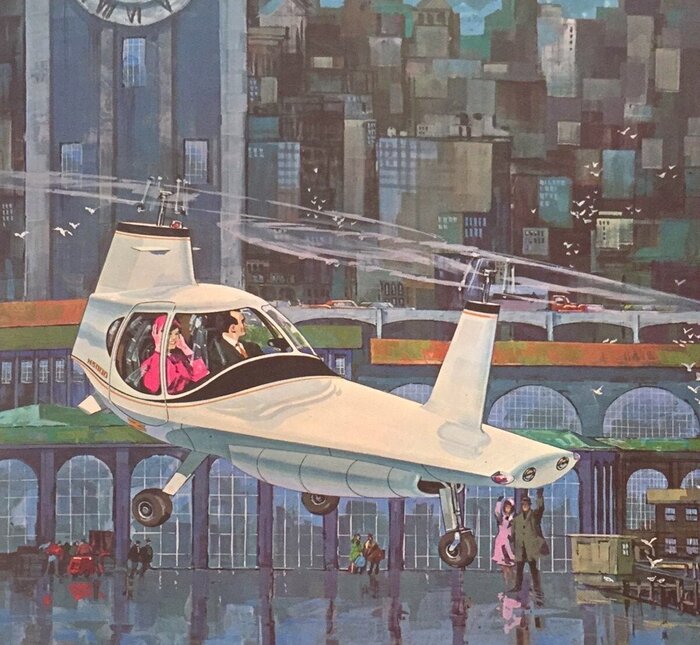
26 мая 1966 годасостоялся первый полёт вертолётаFilper Research Beta 200A.
Filper Research Beta 200A в полёте. Рисунок, автор неизвестен.
Бывший инженер Lockheed CorporationУильям Орр(William F. Orr) в 1958 году начал работу над системой стабилизации несущего винта "Gyroflex".
Компания Filper Corporation в 1965 году выкупила эту разработку и финансировала постройку полноценных вертолётов. Орр продолжил работы и в 1966 году был построен Model 200A.
Filper Research Beta 200A в полёте. Фото: Filper Corporation
Это был нетипичный вертолёт продольной схемы с двухместной кабиной в задней части обтекаемого фюзеляжа, по форме напоминающего женскую туфельку. В системе "Gyroplex" для стабилизации несущего винта использовались специальные противовесы, прикрепленные к основанию лопастей.
Filper Research Beta 200A. Вид спереди. Фото: Filper Corporation
В передней части фюзеляжа стоял двигатель ContinentalIO-360E, мощностью в 210 л.с.(разница в обозначении проистекала от двигателей - Continental IO-360E на 200А, ГТД Allison 250-C18 на 300А и Continental IO-520 на 400А. Что было на Model 600 - неизвестно, но по общей логике должно быть что-то газотурбинное).
Максимальная скорость - 241 км/ч, дальность полёта - 642 км.
Filper Research Beta 200A. Вид сбоку. Фото: Filper Corporation
Несмотря на то, что сначала единственный построенный Model 200A неплохо летал, успешным проект не стал. В одном из полётов вертолёт потерпел аварию из-за проблем с несущим винтом. В итоге, он не смог получить сертификат лётной годности и проект закрыли.
Filper Research Beta 200A. Фото: CC BY-SA 2.0 // Bill Larkins
Основные лётно-технические характеристики
Максимальная скорость: 241 км/ч,
Дальность действия: 642 км,
Длина: 5,33 м,
Высота: 2,8 м,
Масса пустого: 453 кг,
Максимальная масса: 771 кг,
Силовая установка: 1 × поршневой двигатель ContinentalIO-360E, мощностью 210 л.с.(147,1 кВт),
Диаметр несущего винта: 2 × 6,22 м.
Все фото и материалы взяты из открытых источников и принадлежат их авторам
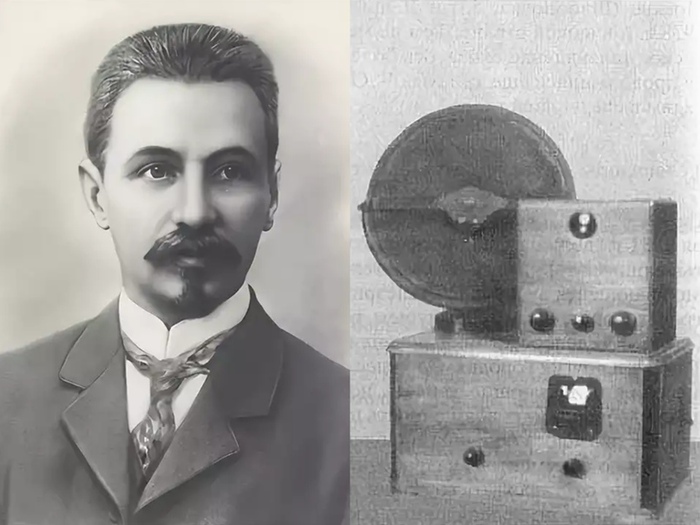
В этот день 1911 года профессор Санкт-Петербургского технологического института Борис Розинг произвел демонстрацию геометрических фигур посредством электронно-лучевой трубки, то есть предтечи кинескопа. По сути дела — это была передача первого в мире электронного телевизионного изображения. Это было большим технологическим прорывом. Помогал профессору студент Санкт-Петербургского технологического института Владимир Зворыкин.
В 1921 году Ленин обсуждал письмо о создании системы видеофона. Борис Розинг, уже немолодой человек в то время, остался в России и продолжал работать, периодически возвращаясь к идеям телевидения. А вот Владимир Зворыкин уехал в США, где добился в деле создания электронного телевидения больших успехов. В 1933 году его, американского гражданина, пригласили приехать в СССР, прочитать курс лекций по принципам телевидения.
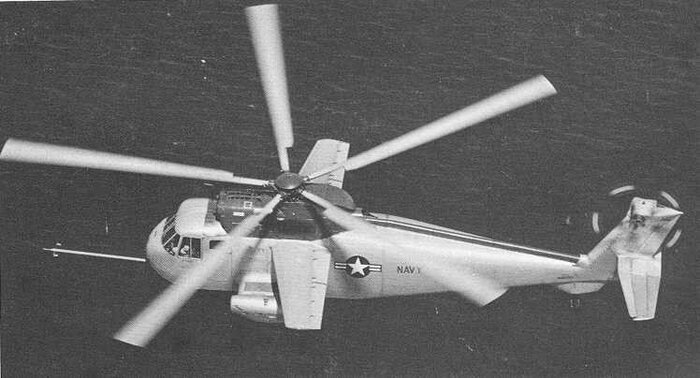
21 мая 1965 годасостоялся первый полёт экспериментального винтокрыла - летающей лабораторииSikorsky S-61F.
Экспериментальный винтокрыл Sikorsky S-61F, 1965 г.
Немного предыстории: В середине 60х годов в Армии США возникла потребность в высокоскоростном ударном вертолёте. Программу его создания назвали "Advanced Aerial Fire Support System" или AAFSS. Новая машина должна была заменить Bell UH-1, основную "рабочую лошадку" времён Вьетнамской войны. В требования к машине закладывалась скорость в 260 узлов, в то время как ударная модификация UH-1 не дотягивала и до 100 узлов.
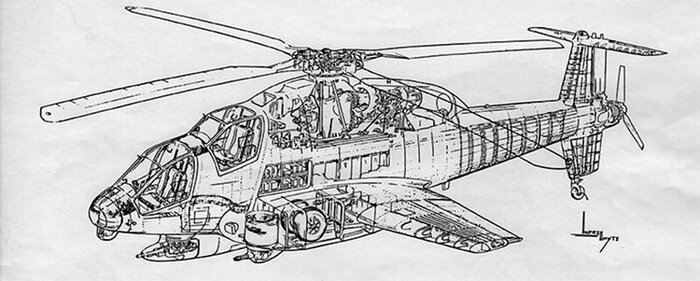
На конкурс подали предложения много компаний, для детальной проработки были выбраны две: Lockheed и Sikorsky. Предложение Lockheed известно под индексом CL-840 (ряд источников приводит индекс Lockheed XH-51A Rigid Rotor), а далее более известный, как AH-56 Cheyenne.
Схематический рисунок S-66, автор Энди Уайт.
Машина Сикорского: S-66. Не останавливаясь детально (цель публикации несколько иная) сообщу, что победил проект Lockheed, и была начата постройка, а далее и испытания AH-56 Cheyenne. Однако в силу сложности и дороговизны первого, в конце 60-х предпочтение опять получил Сикорский, и был построен Sikorsky S-67 Blackhawk (первый с таким именем). Но после катастрофы последнего в Фарнборо программа совсем была закрыта. Когда-нибудь в ближайшее время обещаю подробно описать и первое предложение Сикорского, и машину Локхида и вторую попытку Сикорского.
Но в этой "коротенькой статейке", хочу рассказать о двух летающих лабораториях, которые были построены и испытаны компанией Сикорского, в ходе работы над проектом S-66. Итак:
Летающая лаборатория S-61A "Rotorprop"
На ранних стадиях Сикорский рассматривал идею конвертоплана с поворотными винтами или крылом, но позже отказался от неё в пользу винтокрыла, как более простой машины с меньшим весом конструкции и низшей степенью технического риска.
Проект винтокрыла Sikorsky S-66 - отображение модели в режиме пропеллера.
Проект винтокрыла Sikorsky S-66 - отображение модели в режиме рулевого винта
Уникальным решением в проекте S-66 было использование поворотного винта ( как это видно на фото выше), который мог становиться в положение рулевого винта, или после поворота на 90 градусов превращаться в толкающий пропеллер. Концепция получила название "Rotorprop".
Летающая лаборатория S-61A "Rotorprop"
Была построена летающая лаборатория на базе принадлежащего компании Sikorsky S-61A. Он использовал штатный рулевой винт, но на поворотном подвесе, который обеспечивал поворот за 3 секунды. Управлять поворотом винта мог как пилот, так и автоматика с ростом скорости полёта. Крейсерская скорость 370 км/час и максимальная 460 км/час, но не совсем ясно - они показаны в ходе испытаний на летающей лаборатории или расчётные для проекта S-66.
Экспериментальный винтокрыл Sikorsky S-61F, 1965 г.
Вторая примечательная летающая лаборатория, тоже на базе Sikorsky S-61, уже модификации S-61F (эта машина начала свою жизнь как Navy HSS-2 (SH-3A), BuNo 148033). В этом варианте вертолёт был переоборудован в винтокрыл, который отличался улучшенными обводами фюзеляжа, имел верхне-расположенное крыло размахом 9,75 м и два ТРД Pratt 8 Whitney J60-P-2 (ряд источников приводит маркировку J69) с тягой по 1315 кг в гондолах по бокам фюзеляжа в дополнение к двум ГТД General Electric T58-GE-8B, которые приводили несущий и рулевой винты.
Экспериментальный винтокрыл Sikorsky S-61F, 1965 г.
Свой первый полёт этот второй экземпляр винтокрыла состоялся в 21 мая 1965 года. Во время лётных испытаний в июле 1965 года на винтокрыле S-61F была достигнута максимальная скорость 390 км/ч, превышающая рекорд скорости 356,3 км/ч советского винтокрыла Ка-22, но не зарегистрированная в качестве нового мирового рекорда. Лётные испытания S-61F проводили известные лётчики-испытатели фирмы "Сикорский" Байрон Грэхэм и Курт Каннон.
Экспериментальный винтокрыл Sikorsky S-61F, 1965 г.
Компания Sikorsky была уверена в своей конструкции и продолжала успешные испытания, и была одновременно удивлена и разочарована в ноябре 1965 года, когда армия выбрала конструкцию Lockheed для перехода на этап лётной разработки прототипа перед получением контракта на производство.
На этом проекты были свёрнуты, но полученный большой опыт и наработки применились в будущем успешном проекте - системой тактических транспортных вертолётов общего назначения, которая стала началом длинной линейки Black Hawk/Seahawk.
00:00 Начало 00:34 Венерический сушняк 04:15 Пластиковые думы экологов 06:54 Почему морщат лбы учёные и киты 09:27 Мощь современных технологий 13:20 Как медики демонов изучали 15:00 Фотошоп на службе науки
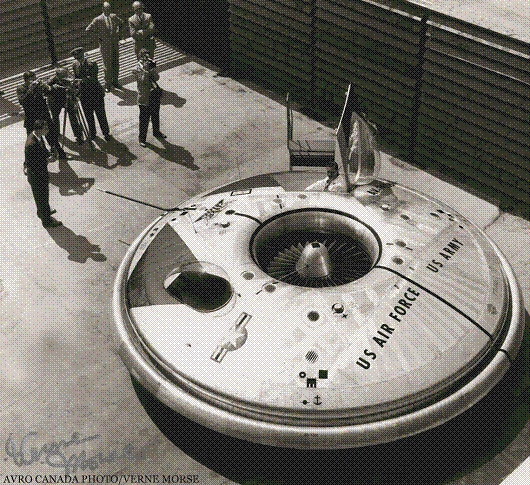
17 мая 1961 года состоялся первый взлёт и переход в горизонтальный полёт необычного летательного аппарата под наименованием VZ-9 Avrocar.
Это был экспериментальный летательный аппарат вертикального взлёта и посадки, разработанный канадской компанией "Авро Эркрафт" по засекреченному заказу ВВС США, с целью изучения аэродинамики и возможностей дискообразных аппаратов.
Канадская фирма начала проводить исследования с 1955 года. Предполагалось, что такая схема с подъёмными вентиляторами, предложенная в 1947 году английским конструктором Джоном Фростом, благодаря использованию воздушной подушки потребует при взлёте меньшей энерговооруженности. Кроме того, отбрасываемый вентилятором воздушный поток, смешиваемый с газами двигателя и используемый для образования воздушной подушки, будет иметь значительно меньшие скорость и температуру. Это спорно, но любопытно...
Был ли этот причудливый аппарат революционным в авиации? ...Нет.... Ибо летательный аппарат с дискообразным несущим корпусом и расположенным в нём вентилятором был предложен советским академиком Б. Н. Юрьевым ещё в 1921 году, но её сочли тупиковой ветвью развития авиации. Не будем забывать и про разработки "нацистской" Германии по дискообразным объектам (об этом мы поговорим как-нибудь отдельно). Однако в Северной Америке решили попробовать.
В 1959 году по объединенному контракту армии и ВВС США была завершена постройка летательного аппарата с дискообразным корпусом, получившего официальное обозначение VZ-9V и название "Аврокар". Конечно же тут же аппарат назвали "Флаинг Сосэр" (летающее блюдце) Первые испытания (на привязи - причём именно на м цепях) VZ-9V начали проходить 5 декабря 1959 года. Совершая непродолжительные полеты он вскоре был передан для испытаний на базу ВВС "Эдвардс". Первый реальный взлёт с переходом к горизонтальному полёту был совершен 17 мая 1961 года.
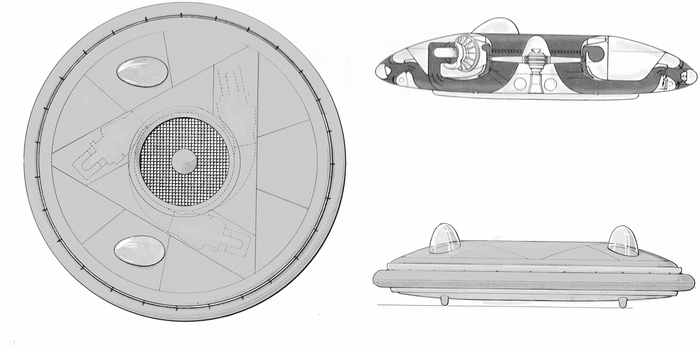
Построенный экспериментальный VZ-9V "Аврокар" предназначался для полётов с дозвуковой скоростью, поэтому он имел закругленный носок круглого крыла и кольцевой воздухозаборник по периметру крыла для входа эжектируемого потока воздуха. Круглый дискообразный корпус диаметром 5,5 м имел эллиптический профиль с относительной толщиной 20% и кривизной 2%. Характеристики не были опубликованы, хотя указывалось, что он может иметь максимальную скорость в пределах 480 км/ч. Принципиальным отличием экспериментального аппарата было то, что он мог не только летать подобно самолёту на большой высоте, но и передвигаться вблизи земли на воздушной подушке. Аппарат имел круглый дискообразный корпус, в центре которого был установлен вентилятор. Всасываемый им воздух по системе каналов направлялся к одноконтурному кольцевому соплу, проходящему по периферии аппарата.
Воздух "эжектировался" через кольцевую щель на верхней поверхности корпуса аппарата. Центральный вентилятор диаметром 1,52 м имел привод от тихоходной турбины, приводимой во вращение потоком газов, вытекающим из сопл трёх ТРД Континентал J69-T9 с тягой по 420 кгс или эквивалентной мощностью по 1000 э.л.с. Для создания горизонтальной силы тяги кольцевая воздушная завеса может отклоняться с помощью поворотных рулей в кольцевом сопле.
Переход от движения на воздушной подушке над землёй к свободному полёту происходил следующим образом: аппарат ВВП разгонялся над землёй на воздушной подушке до такой скорости, что его дискообразный корпус создавал подъёмную силу, достаточную для поддержания в воздухе, а затем и для его подъёма. При этом кольцевая струя, свертываясь, превращалась в плоскую пелену, а вытекающий из кольцевого сопла воздух создавал горизонтальную тягу.
Однако в 1962 году разработка VZ-9V была прекращена. Проведённые испытания VZ-9V "Аврокар" показали, что он не обладает достаточной устойчивостью, кроме того, постоянно возникавшие неполадки в работе его силовой установки и системы управления послужили причиной прекращения его испытаний.
Разработка аппарата ВВП VZ-9V под руководством Джона Фроста и его испытания велись в обстановке большой секретности, поэтому по нему публиковалась крайне ограниченная информация. Естественно, что необычайная форма летательного аппарата и отсутствие официальных сведений об испытаниях, проводившихся в 1961 - 1962 годах, вызвали в этот период интенсивные публикации о полетах неопознанных летающих объектов (НЛО) в виде "летающих блюдец".
Этот вроде бы простой вопрос, заданный в группе, посвящённой инженерному делу, неожиданно поделил аудиторию почти поровну. «Ну понятно же, что аналоговое! Деревянные счёты, какая тут цифра, камон!» — писали одни. «Да с чего вдруг? Вы вообще понимаете разницу между цифровым и аналоговым?» — не соглашались с ними другие. Давайте разберёмся, как всё обстоит на самом деле.
Для ЛЛ: счёты — цифровые
Слова «цифра», «цифровой», «цифровизация» мы слышим чуть ли не каждый день, причём, как правило, с положительной коннотацией. От этого может сложиться впечатление, будто цифровое — значит современное, быстрое, прогрессивное. Аналоговое, соответственно, — устаревшее, медленное и отсталое.
Это заблуждение. Понятия «цифровой» и «аналоговый» ничего не говорят ни о возрасте, ни о технологической продвинутости предмета. Аналоговое устройство может быть современным и электронным, а цифровое — старым и механическим. Как, разумеется, и наоборот.
На самом деле эти слова лишь указывают, в какой форме представлен информационный сигнал, обрабатываемый устройством. Аналоговый сигнал меняется непрерывно и в любой момент времени может принимать любые значения. Цифровой сигнал меняется прерывисто и может принимать лишь конечный набор значений. Такие отдельные значения называют дискретными.
Простые примеры
Представьте себе плавный регулятор яркости света — диммер. Положение его ручки можно менять непрерывно, и каждому положению будет соответствовать определённая яркость света. Её можно установить с любой точностью, которую только позволяет конструкция. Диммер в нашем примере — аналоговое устройство.
Обычный электрический выключатель имеет только два положения — включено или выключено. Простой выключатель в нашем примере — это цифровое устройство с двумя дискретными состояниями.
За более строгими формулировками обратимся к государственному стандарту — ГОСТ 17657-79 «Передача данных. Термины и определения»:
Аналоговый сигнал — сигнал данных, у которого каждый из представленных параметров описывается функцией времени и непрерывным множеством возможных значений.
Цифровой сигнал — сигнал данных, у которого каждый из представляющих параметров описывается функцией дискретного времени и конечным множеством возможных значений.
Формулировки не самые изящные, но главная разница здесь та же самая — это разница между непрерывным и дискретным.
Как считают на счётах
Картина Бориса Кустодиева «Купец, считающий деньги», 1918
Деревянная рамка счёт удерживает некоторое количество параллельных спиц, на которых нанизаны костяшки — обычно по 10 штук. Каждая спица с костяшками соответствует определённому разряду числа — единицам, десяткам, сотням и так далее. Чтобы «набрать» число на счётах, нужно перекинуть влево столько костяшек, сколько указывают цифры этого числа. Например, для числа 15 это будет одна костяшка на спице десятков и пять костяшек на спице единиц.
При работе на счётах имеет смысл только то, находится костяшка справа или слева. Если костяшку зафиксировать в промежуточном положении, никакого нового значения — скажем, дробного — она выражать не будет. Говоря научным языком, счёты работают в десятичной системе счисления с непозиционным унарным кодированием внутри каждого разряда.
То есть счёты оперируют лишь дискретными значениями, а значит, это цифровое устройство. Да, ручное, низкотехнологичное, но цифровое по форме представления данных. Если бы счёты были аналоговыми, нужно было бы плавно перемещать костяшки по спицам, строго следя за тем, какое именно положение они занимают, что в данной конструкции крайне неудобно, да и бессмысленно.
Родственники счётов
К цифровой технике относятся японский соробан, китайский суаньпань, греческий абак. Также цифровыми являются арифмометры — например, арифмометр Однера и все его потомки, включая знаменитые арифмометры «Феликс».
Арифмометр системы В. Т. Однера, 1890-е гг.
В них используются зубчатые колёса с переменным количеством зубцов — от 0 до 9. Зубец не может выступать чуть-чуть — он либо есть, либо его нет. Соответственно, барабан с цифрами под воздействием этого зубца либо повернётся на одно фиксированное деление, либо не повернётся вообще. Все промежуточные состояния будут означать неисправность устройства.
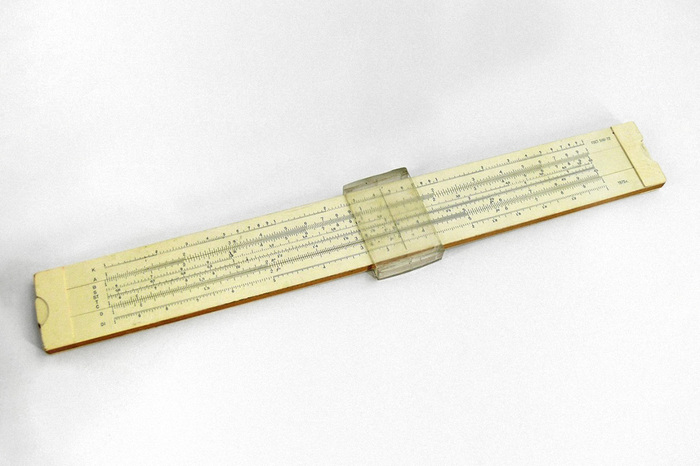
Тогда какая же вычислительная техника является аналоговой, если и современный компьютер, и старый арифмометр, и совсем древние счёты — цифровые? Пример вам наверняка известен. Самый распространённый аналоговый вычислительный прибор — это логарифмическая линейка.
Линейка, произведённая Ленинградской государственной фабрикой счётных приборов, 1975 г.
В ней числа представляются в виде длин отрезков — или, можно сказать, длина становится аналогом величины числа. У логарифмической линейки нет дискретных положений, её движок и бегунок перемещаются плавно. Она одинаково хорошо работает и с целыми, и с дробными числами, а точность вычислений определяется только качеством её изготовления и вашей аккуратностью. Удобство же её в том, что вместо умножения и деления самих чисел мы выполняем сложение и вычитание их логарифмов. А складывать и вычитать намного проще, чем умножать и делить.
Существуют и более сложные аналоговые вычислительные устройства — машины для предсказания приливов, дифференциальные анализаторы, интеграторы, аналоговые компьютеры. Эти устройства могут быть механическими, гидравлическими, электронными. Объединяет их то, что процессы, которые протекают внутри них, с математической точки зрения являются аналогами процессов в реальном мире — тех, которые нужно моделировать или прогнозировать. Отсюда, собственно, и название. Все физические величины внутри таких машин изменяются непрерывно.
Преобразование сигнала
Цифровой и аналоговый сигналы принципиально различны, но нельзя сказать, будто «вместе им не сойтись». Наоборот, в окружающей нас технике эти сигналы постоянно преобразуются из одного типа в другой. Например, это происходит, когда мы говорим в микрофон или слушаем звук через динамики. Электрический сигнал, выдаваемый микрофоном или поступающий на динамик, — аналоговый. В нём аналогом звукового давления является электрическое напряжение. А вот передаётся и обрабатывается сигнал в цифровой форме, проходя через АЦП и ЦАП — аналого-цифровой и цифро-аналоговый преобразователи. Но как они работают, уже тема для отдельной беседы.